| Mark-8 Design | Microcomputer According to Titus | Microcontroller Project | Postscriptum | Lessons Home |
Lesson 6: Instruction Set
The following section will cover some of the basic instructions the Pico's SX-28 Processor has to offer. The instructions mentioned in this section are listed in the the table below in the order that they appear in.
Contents [hide]
| Instruction | Parameters | Meaning |
| MOV | dest, src | Move src to dest (dest = src) |
| INC | dest | dest++ (dest = dest + 1) |
| DEC | dest | dest-- (dest = dest - 1) |
| JMP | addr9 | Jump |
| CSB | Compare, Skip if Below | |
| CJAE | Compare, Jump if Above or Equal to | |
| JZ | addr9 | Jump if zero flag is set |
| JNZ | addr9 | Jump if zero flag is not set |
| ADD | dest, src | ADD (dest = dest + src) |
| SUB | dest, src | SUB (dest = dest - src) |
| RL | dest | Rotate dest Left w/ Carry |
| RR | dest | Rotate dest Right w/ Carry |
| NOP | No operation | |
| STC | Set carry flag | |
| CLC | Clear carry flag | |
| STZ | Set zero flag | |
| CLZ | Clear zero flag | |
| CALL | addr8 | CALL subroutine |
| RET | Return from a subroutine | |
| dest = destination, src = source, addr8 = 8-bit address, addr9 = 9-bit address | ||
Move Instruction
The MOV (Move) instruction is used to set one memory location equal to another memory location or constant. It can be equated to a single equal sign in higher level languages.
Increment and Decrement Instructions
The INC (increment) and DEC (decrement) instructions are commonly used in conjunction with loop structures to count how many times the loop has been executed. Incrementing and decrementing affects the zero flag and are ideal in use with jump instructions to create loops and if/else statements.
Jump Instructions and Control Structures
The JMP (jump) instruction and its variants are very useful instructions. They are most commonly used in conjunction with code labels which point to a specific location in the program's execution to jump to. If/else and loop structures common to higher level programming languages can be constructed using a combination assembly instructions. If/else statements can be written with a combination of jump and comparison instructions and for loops can be written with jump, comparison, and increment/decrement instructions.
| C++/Java If/Else | Assembly #1 | Assembly #2 |
if (x<y)
{
//stuff
}
else
{
//more stuff
}
|
CSB x,y
JMP else
//stuff
jmp endif
else
//more stuff
endif
|
CJAE x,y,else
//stuff
jmp endif
else
//more stuff
endif
|
The high-level if/else statement above can be written in assembly with relative ease. The CSB (Compare, Skip if Below) instruction is used to test the condition. If the condition is false, it will skip the jump instruction pointing to the else code label and will perform the code in the "stuff" area and then jump to the endif code label. If the condition is true, then the jump instruction will not be skipped and the "more stuff" area will be reached. The third segment of code is an alternative way to write the loop by using the CJAE (Compare, Jump if Above or Equal to) instruction which combines compare and jump instructions.
| C++/Java For Loop | Assembly Loop w/ "for" logic | Condensed Assembly Loop |
for(int i=0; i<10; i++)
{
//stuff
}
|
MOV i, 0 loop CMP i,10 JZ endloop //stuff INC i JMP loop endloop |
MOV i, 10 loop //stuff DEC i JNZ loop |
The three loops above demonstrate how loop logic from a high-level language may be implemented with assembly language. The second loop's logic is nearly identical to that of the first loop: Initializing i to 0, comparing i with 10 and escaping the loop if the condition isn't met, performing "stuff", incrementing i, then jumping back to the beginning of the loop again. The second loop is logically identical to the first loop, but by tweaking it a bit, the third loop can be attained which takes advantage of the zero flag to reduce the number of instructions needed. Looping can be further optimized with more advanced instructions which combine incrementing and decrementing with jumping instructions.
Arithmetic Instructions
The arithmetic instructions supported by the Pico's processor are limited to ADD (addition) and SUB (subtraction). Division is not supported since the processor is not equipped to handle floating point operations and the result of such operations are often floating point values. Multiplication is also not supported but is easy to replicate and can be achieved by repeated addition.
|
MOV answer, 0 loop ; code label ADD answer, number1 number2-- JNZ loop |
The purpose of the code segment to the left is to demonstrate multiplication of two numbers by utilizing repeated addition. Answer is initialized to zero. Number1 and Number2 should already have arbitrary values, where number2 is positive. |
The code segment only has the functionality to multiply a positive or negative integer with a positive integer. It could be expanded upon to allow either operand to be positive or negative. Integer division and modulus operations can be implemented in a similar manner.
Bit Rotation Instructions
Bit rotation instructions have a wide range of uses. Cycling through the bits of a memory location to check for flags is simple with bit rotations. The SX-28 only supports RL (left rotation) and RR (right rotation) which include the carry flag during the rotation. The other shifts such as the arithmetic shift can be emulated at the expense of a few more clock cycles.
|
RR w MOV w.0, w.1 |
CC RL w |
| To mimic the ASR instruction, the bits are first rotated, then the most significant bit is reinstated. The carry flag is simply ignored. | To mimic the ASL instruction, the carry flag is set to zero before the bits are rotated so zero shifts to the least significant bit. |

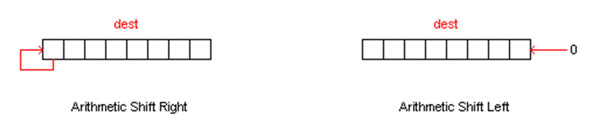
Figure 6-6: Rotation Instruction and Arithmetic Shifts
The arithmetic shift is similar to the rotation instructions innate to the SX-28, but the sign bit is preserved during right shifts and 0 is shifted into the least significant bit during left shifts. Quick division and multiplication by 2 can be achieved with arithmetic shifts.
Additional Instructions
The NOP instruction can be used to synchronize program execution up with with an external I/O stream.
CLC and STC can be used to clear and set the carry flag.
CLZ and STZ can be used to clear and set the zero flag.
CALL and RET are used to jump to and from subroutines.
A variety of comparison instructions are available for use in addition to the ones mentioned in the control structures portion.